

Opis
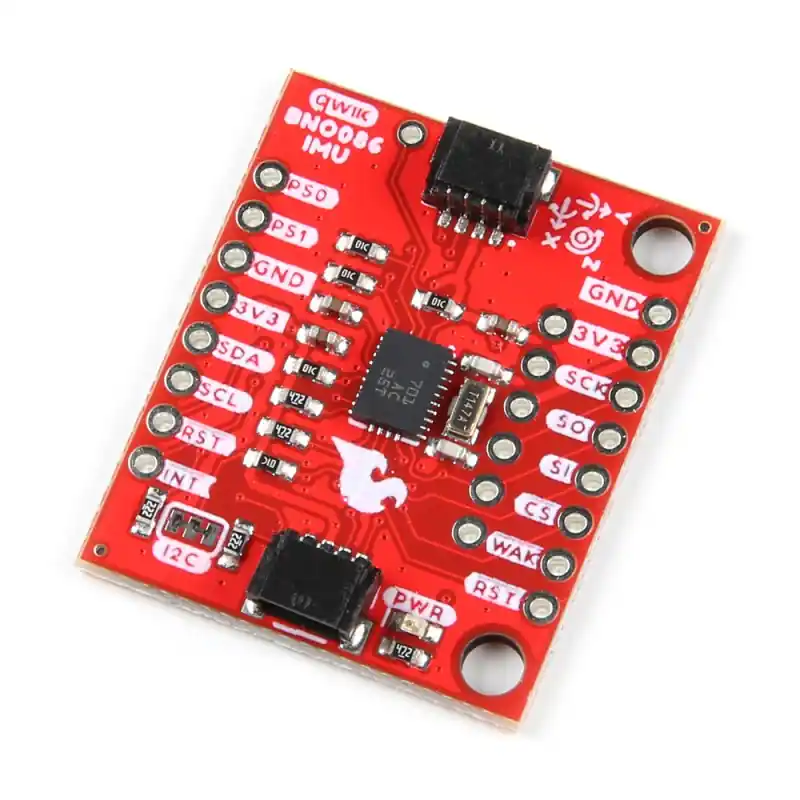
Moduł z czujnikiem do zastosowania w obszarze wirtualnej rzeczywistości (VR) to doskonałe rozwiązanie dla entuzjastów VR oraz twórców aplikacji wirtualnej rzeczywistości. Ten zaawansowany moduł bazuje na układzie BNO086, który integruje akcelerometr, żyroskop oraz magnetometr z mikrokontrolerem o rdzeniu ARM Cortex M0+.
Sercem tego modułu jest jednostka pomiaru bezwładnościowego BNO086 (IMU), która generuje niezwykle dokładne wskazania wektorów obrotu. Dzięki temu użytkownicy VR mogą cieszyć się płynnym i precyzyjnym śledzeniem ruchu, co przekłada się na bardziej realistyczne doświadczenia w wirtualnej rzeczywistości. Co więcej, dane z czujnika są łączone i korygowane pod kątem dryftu, co zapewnia stabilność pomiarów i eliminuje błędy.
Moduł został wyposażony w dwa złącza Qwiic oraz złącze z rastrem 2,54 mm, na których wyprowadzone są interfejsy I2C, UART oraz SPI. Dzięki temu masz pełną swobodę w integracji tego modułu z innymi urządzeniami i platformami. To rozwiązanie, które daje Ci elastyczność i wszechstronność w tworzeniu własnych projektów VR. Układ VR jest wspierany przez bogatą bibliotekę, która udostępnia gotowe dane wektorów obrotu, a także odczyty akcelerometru, żyroskopu i magnetometru. Możesz także korzystać z funkcji liczenia kroków i kalibracji, co znacznie ułatwia pracę nad zaawansowanymi projektami VR.
Warto podkreślić, że moduł ten jest gotowy do użycia i nie wymaga skomplikowanej konfiguracji. Dzięki niemu możesz skoncentrować się na tworzeniu niesamowitych aplikacji VR, nie martwiąc się o szczegóły techniczne. To rozwiązanie, które otwiera przed Tobą świat wirtualnej rzeczywistości i pozwala na eksplorację nieskończonych możliwości. Dzięki zaawansowanym technologiom i dokładnym pomiarom, możesz być pewien, że Twój projekt VR będzie działać z najwyższą precyzją i dokładnością. To moduł, który spełni Twoje oczekiwania i pozwoli na stworzenie niesamowitych doświadczeń VR.
Właściwości
- Zintegrowany akcelerometr, żyroskop i magnetometr
- Mikrokontroler z rdzeniem ARM Cortex M0+
- I2C (domyślnie): do 400 kHz
- SPI: do 3 MHz
- UART: 3 Mb/s
- Wektor obrotu:
- Błąd dynamiczny: 3,5 °
- Błąd statyczny: 2,0 °
- Wektor obrotu (GRV):
- Błąd dynamiczny: 2,5 °
- Błąd statyczny: 1,5 °
- Dryf kursu: 0,5 °/min
- Wektor obrotu geomagnetycznego:
- Dynamiczny błąd obrotu: 4,5 °
- Statyczny błąd rotacji: 3,0 °
- Błąd kąta grawitacji: 1,5 °
- Dokładność przyspieszenia liniowego: 0,35 m/s2
- Dokładność akcelerometru: 0,3 m/s2
- Dokładność żyroskopu: 3,1 °/sek
- Dokładność magnetometru: 1,4 µT
- 2x złącze Qwiic
- Adres I2C: 0x4B (domyślny), 0x4A
- Rezystory podciągające 2,2 kΩ
- Dioda LED zasilania
- Zworki konfiguracyjne
- Zasilanie: 2,4 V do 3,6 V
- Wymiary: 25,4 x 30,48 mm



